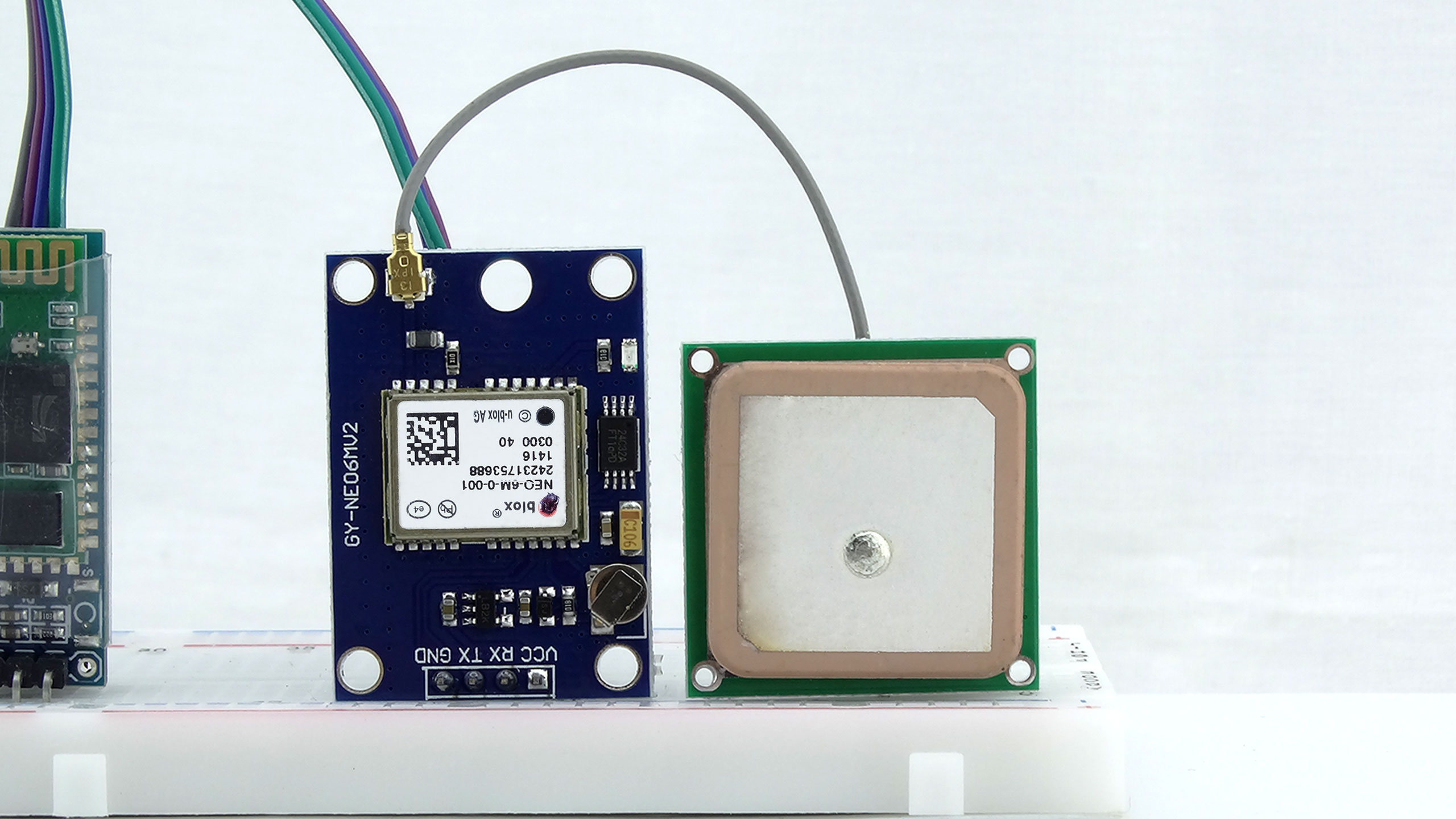
GY-NEO6MV2 GPS Modülü
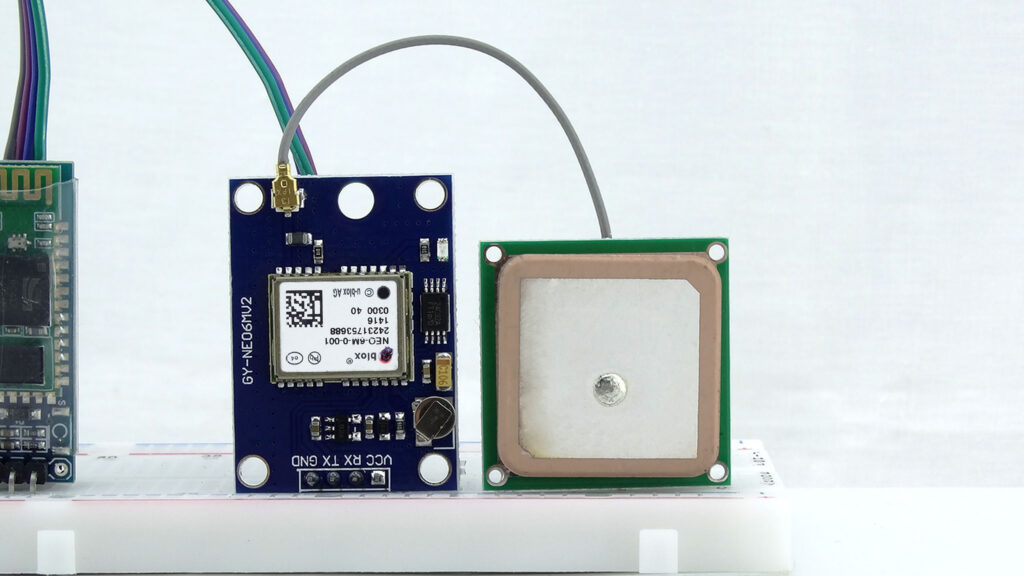
GY-NEO6MV2, GPS (Küresel Konumlandırma Sistemi) sinyallerini algılayabilen ve algıladığı sinyaller ile konumlandırma işlemi yapabilen bir modüldür. Bu modül, düşük maliyetli, küçük boyutlu ve yüksek hassasiyetli (2~5 metre) bir GPS çözümü sunmaktadır. Genellikle uçuş kontrol sistemlerinde, araç takip sistemlerinde ve konum tabanlı uygulamalarda tercih edilmektedir.
GPS modüllerin kullanıldığı bazı yaygın alanlar ve uygulamalar:
- Drone ve İHA sistemleri: Konum izleme ve navigasyon.
- Araç Takip Sistemleri: GPS verileriyle araçların konumunu takip etme.
- Yürüyüş ve Bisiklet Rotaları: GPS ile rota takibi ve harita oluşturma.
- Denizcilik: Konum tespiti ve yön bulma.
GPS Nasıl Çalışır?
GPS (Küresel Konumlandırma Sistemi), dünya yörüngesinde bulunan 30’dan fazla uydunun oluşturduğu bir tür navigasyon ağıdır. Bu uydular dünya yüzeyine düzenli olarak konum bilgilerini iletirler. GY-NEO6MV2 GPS Modülü ve benzeri GPS alıcıları ise bu sinyalleri süreklı olarak dinlerler. Bu sayede en az 3 uydunun konumu ve mesafesi hesaplandığında, bu verileri baz alarak dünya yüzeyinde kendi konumunu hesaplayabilirler.
Trilaterasyon
Yukarıda bahsedilen en az 3 uydu verisi ile hesaplama yöntemine "Trilaterasyon" adı verilmektedir.
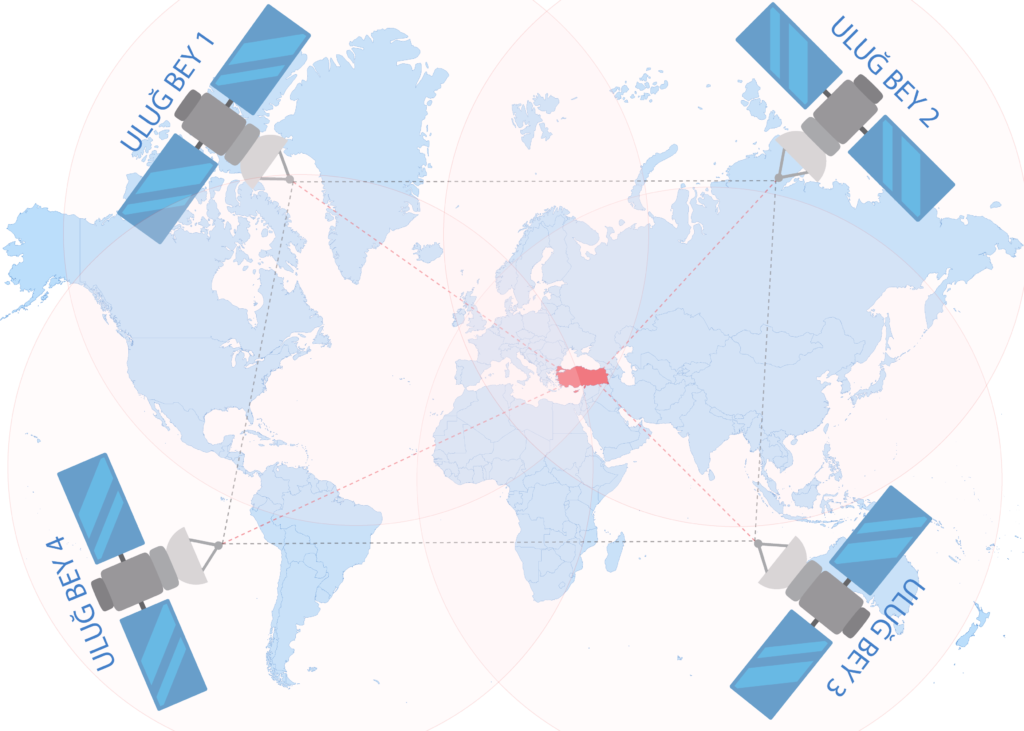
ULUĞ BEY
"Uluğ Bey Küresel Konumlandırma Sistemi", ülkemizde milli kaynaklarımız ile Fergani Uzay Teknolojileri Bilişim Sanayi ve Ticaret A.Ş. tarafından geliştirilmekte olan GPS ağıdır. 2030'a kadar 100 uydu ile hizmete sunulması planlanmaktadır. Aşağıdaki görselde, Uluğ Bey üzerinden bir GPS ağı örneği verilmiştir.
NEO-6M GPS Çipi
GY-NEO6MV2’nin kalbinde, uydudan alınan verileri işleyerek konum bilgisini sağlayan NEO-6M GPS çipi yer alır. Bu çip, GPS sinyallerini alıp, kullanıcının tam konumunu belirlemesine olanak tanır.
NEO-6 modül serisi, yüksek performanslı u-blox 6 konumlandırma motoruna sahip bağımsız GPS alıcıları ailesidir. Bu esnek ve uygun maliyetli alıcılar, 16×12.2×2.4 mm’lik minyatür bir pakette çok sayıda bağlantı seçeneği ( UART
USB
SPI
I2C ) sunar. Kompakt mimarileri, güç ve bellek seçenekleri NEO-6 modüllerini çok katı maliyet ve alan kısıtlamalarına sahip pille çalışan mobil cihazlar için ideal hale getirir. 50 kanallı u-blox 6 konumlandırma motoru, 1 saniyenin altında bir İlk Düzeltme Süresine (TTFF) sahiptir. 2 milyon korelatöre sahip özel edinim motoru, büyük paralel zaman/frekans uzay aramaları yapabilir ve uyduları anında bulmasını sağlar. Yenilikçi tasarım ve teknolojisi, parazit kaynaklarını bastırır ve çoklu yol etkilerini hafifletir. NEO-6 GPS alıcılarına en zorlu ortamlarda bile mükemmel navigasyon performansı sağlar.
NEO-6M, 50 kanal desteği ile aynı anda birden fazla uyduyu takip edebilir, bu da yüksek doğruluk ve hızlı konum tespiti sağlar. Genellikle 2-5 metre arasında bir doğruluk sunar.
Teknik Özellikler
| Özellik | Değer |
| Alıcı Tipi | 50 Kanal GPS L1 (1575.42Mhz) |
| Yatay Pozisyon Doğruluğu | 2.5m |
| İlk Düzeltmeye Kadar Geçen Süre | Cold Start: 27s Warm Start: 27s Hot Start: 1s Aided Starts: <3s |
| Hassasiyet | -161 dBm |
| Operasyonel Limitler | Dinamik: ≤4 g Yükseklik: 50,000 m Hız: 500 m/s |
| Maksimum Navigasyon Güncelleme Oranı | 5 Hz |
| Özellik | Değer |
| Hız Doğruluğu | 0.1 m/s |
| Yön Doğruluğu | 0.5° |
| İletişim Protokolü | UART USB SPI I2C |
| Seri Haberleşme Hızı | 4800-230400 Bps (Varsayılan 9600 Bps) |
| Çalışma Sıcaklığı | 40°C ~ 85°C |
| Çalışma Voltajı | 2,7V ~ 3,6V |
| Çalışma Akımı | 45 mA |
| TXD/RXD Empedansı | 510Ω |
NEO-6M GPS Çipi hakkında daha ayrıntılı bilgi için datasheet dosyasını inceleyebilirsiniz.
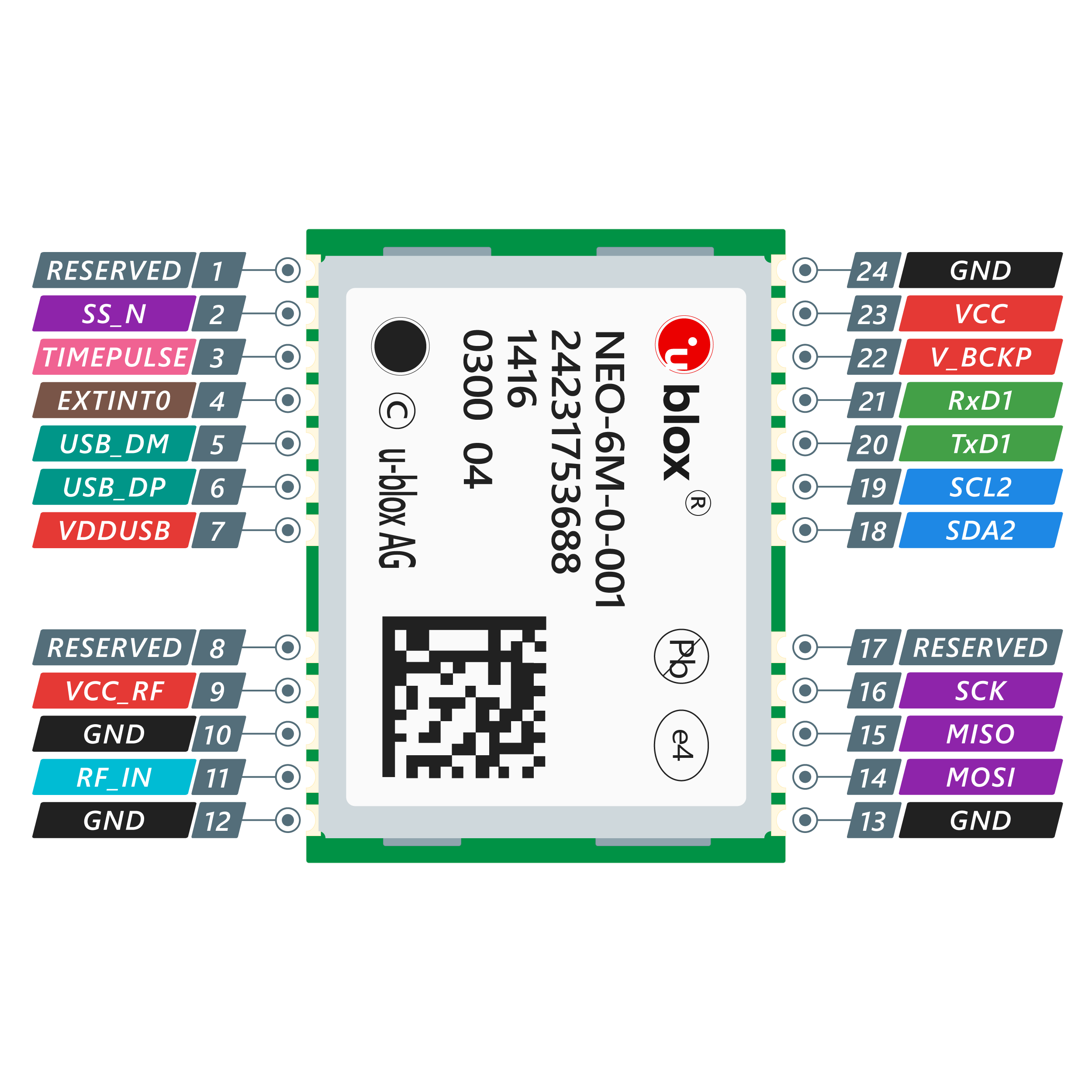
GY-NEO6MV2 GPS Modülü
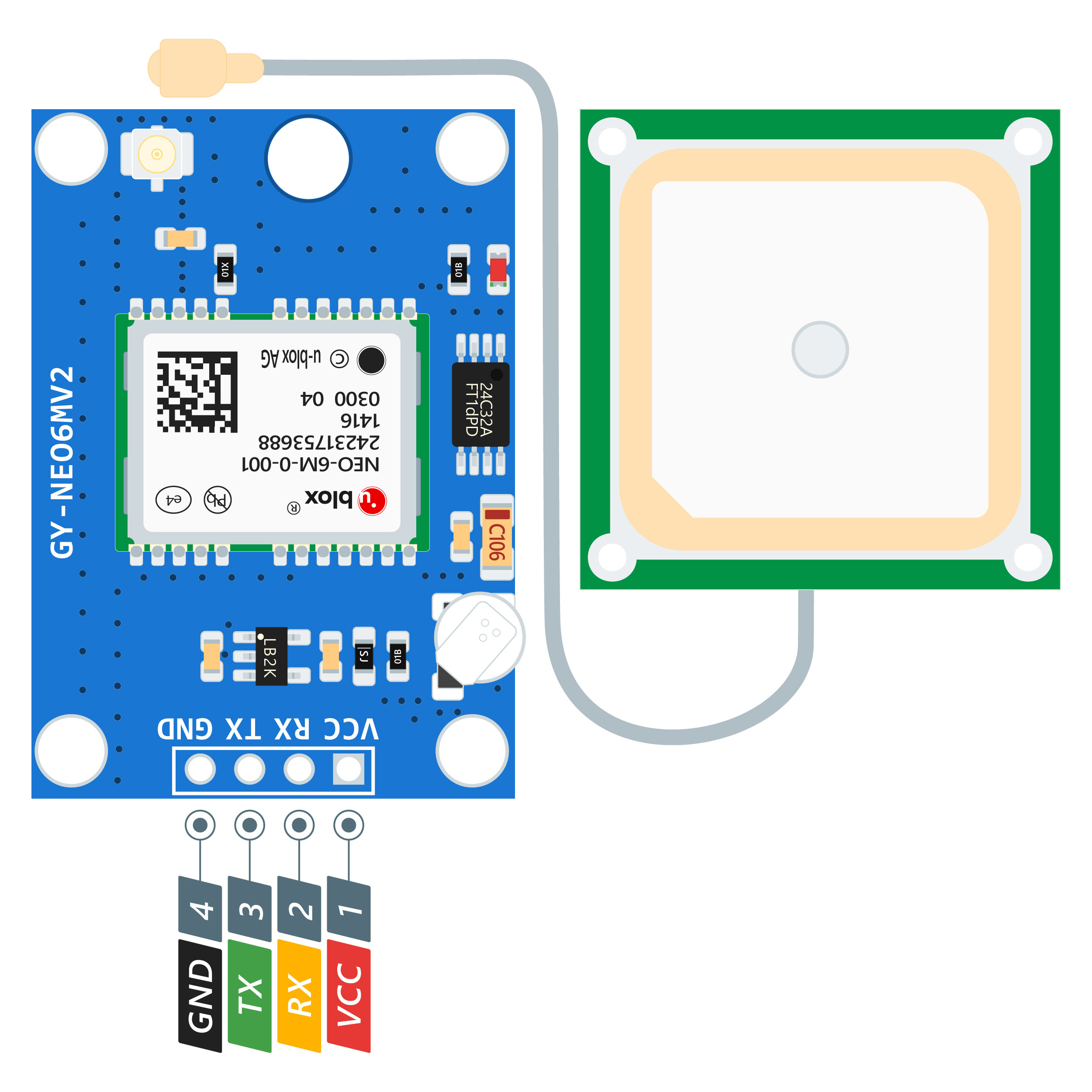
Yukarıda GY-NEO6MV2 GPS Modülü pin şeması görünmektedir. GY-NEO6MV2 GPS Modülü‘nü bir geliştirme kartına (örneğin Trudyo Geliştirme Kartı) bağlamak oldukça basittir. Modül, genellikle UART protokolü kullanarak veri iletimi yapar. Bağlantı için modül üzerindeki RX ve TX pinleri kullanılır. GY-NEO6MV2 GPS Modülü pin tanımlamaları aşağıdaki gibidir:
VCC Besleme voltajı bağlantı noktası (3.3V-5V)
GND Topraklama bağlantı noktası
RX UART veri alma bağlantı noktası
TX UART veri gönderme bağlantı noktası
Çalışma Prensibi
GY-NEO6MV2 GPS Modülü, yerden yaklaşık 20,000 km yükseklikteki uydulardan gelen radyo dalgalarını algılayarak, kullanıcının mevcut konumunu hesaplar. Ayrıca GY-NEO6MV2, 50 kanaldan GPS sinyali alabilir ve bunları işleyerek konum bilgilerini (enlem, boylam, irtifa) hesaplar.
Not
Uygulamada dikkat edilmesi gereken önemli konu, GPS modülünün açık alanda kullanılması gerektiğidir. GY-NEO6MV2 GPS Modülü, GPS sinyallerini almak için açık gökyüzüne ihtiyaç duyar.
Veri Çıkışı ve Formatı
GY-NEO6MV2 GPS Modülü, GPS verilerini NMEA (National Marine Electronics Association) standartı ile iletir. NMEA cümleleri, konum bilgilerini içeren standart bir formattır. Bu cümlelerden en yaygın olanları:
GGA: Konum bilgisi (enlem, boylam, irtifa)
RMC: Çalışma durumu ve konum
VTG: Yön ve hız bilgisi
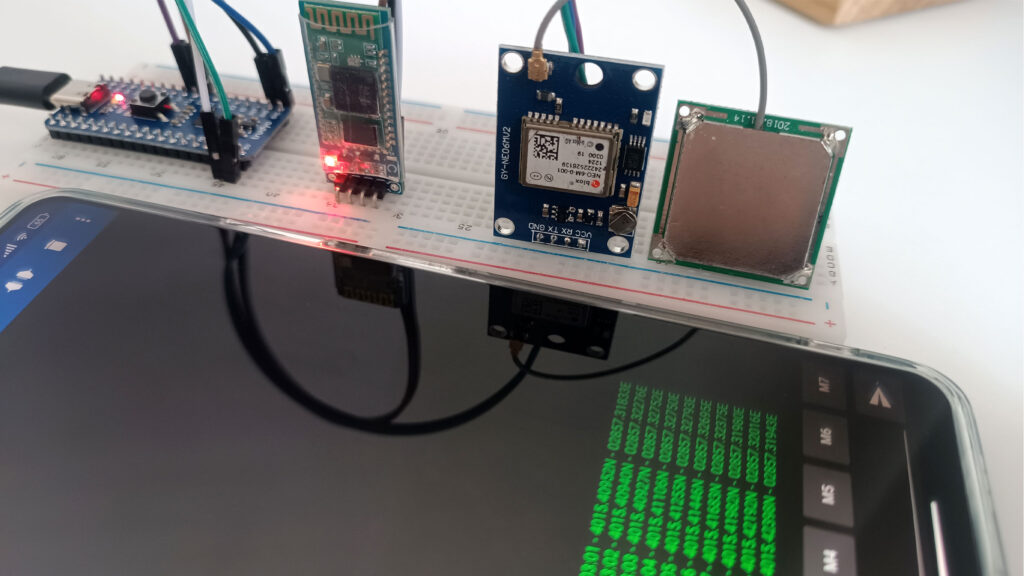
Bu veriler, mikrodenetleyiciler ile işlenip, örneğin bir ekranda ya da başka bir platformda gösterilebilir.
NMEA Cümleleri
$GPRMC,083559.00,A,4717.11437,N,00833.91522,E,0.004,77.52,091202,,,A*57
$GPVTG,77.52,T,,M,0.004,N,0.008,K,A*06
$GPGGA,092725.00,4717.11399,N,00833.91590,E,1,08,1.01,499.6,M,48.0,M,,*5B
$GPGSA,A,3,23,29,07,08,09,18,26,28,,,,,1.94,1.18,1.54*0D
$GPGSV,3,1,10,23,38,230,44,29,71,156,47,07,29,116,41,08,09,081,36*7F
$GPGSV,3,2,10,10,07,189,,05,05,220,,09,34,274,42,18,25,309,44*72
$GPGSV,3,3,10,26,82,187,47,28,43,056,46*77
$GPGLL,4717.11364,N,00833.91565,E,092321.00,A,A*60
GY-NEO6MV2 GPS Modülü, yukaruda belirtilen NMEA cümlelerini saniyede bir kez (1Hz) gönderir. Ancak, yapılandırma ayarlarını güncelleyerek bu değeri saniyede 5 güncellemeye kadar (5Hz) çıkarabilirsiniz. Sırayla bu verileri inceleyecek olursak:
1. $GPRMC (Küresel Konumlandırma Önerilen Minimum Veriler)
// Mesaj Formatı
// $xxRMC,time,status,lat,NS,long,EW,spd,cog,date,mv,mvEW,posMode*cs<CR><LF>
$GPRMC,083559.00,A,4717.11437,N,00833.91522,E,0.004,77.52,091202,,,A*57
| No | İsim | Birim | Format | Örnek | Açıklama |
| 0 | xxRMC | – | string | $GPRMC | RMC Mesaj Kimliği (xx = Geçerli Konuşmacı Kimliği |
| 1 | time | – | hhmmss.ss | 083559.00 | UTC Zaman (08:35:59) |
| 2 | status | – | character | A | Durum (V: Navigasyon Alıcısı Uyarısı, A: Veri Geçerli) |
| 3 | lat | – | ddmm.mmmmm | 4717.11437 | Enlem (Derece ve Dakika), 47 Derece 17.11437 Dakika |
| 4 | NS | – | character | N | Kuzey (N) / Güney (S) Göstergesi |
| 5 | long | – | dddmm.mmmmm | 00833.91522 | Boylam (Derece ve Dakika), 8 Derece 33.91522 Dakika |
| 6 | EW | – | character | E | Doğu (E) / Batı (W) Göstergesi |
| 7 | spd | knots | numeric | 0.004 | Yer Ütünde Hız |
| 8 | cog | degrees | numeric | 77.52 | Yer Üzerindeki Rota |
| 9 | date | – | ddmmyy | 091202 | Gün, Ay, Yıl Biçiminde Tarih (09.12.2002) |
| 10 | mv | degrees | numeric | – | Manyetik Varyasyon Değeri (Boş: Desteklenmiyor) |
| 11 | mvEW | – | character | – | Manyetik Varyasyon E/W Göstergesi (Boş: Desteklenmiyor) |
| 12 | posMode | – | character | – | Mod Göstergesi |
| 13 | cs | – | hexadecimal | *57 | Checksum |
| 14 | CRLF | – | character | – | Satırbaşı (CR) ve Yeni Satır (LF) |
2. $GPVTG (Küresel Konumlandırma Yer Üzerindeki Rota ve Yer Hızı)
// Mesaj Formatı
// $xxVTG,cogt,T,cogm,M,knots,N,kph,K,posMode*cs<CR><LF>
$GPVTG,77.52,T,,M,0.004,N,0.008,K,A*06
| No | İsim | Birim | Format | Örnek | Açıklama |
| 0 | xxVTG | – | string | $GPVTG | VTG Mesaj Kimliği (xx = Geçerli Konuşmacı Kimliği) |
| 1 | cogt | degrees | numeric | 77.52 | Yer Üzerindeki Rota (Doğru) |
| 2 | T | – | character | T | Sabit Alan: Doğru |
| 3 | cogm | degrees | numeric | – | Yer Üzerindeki Rota (Manyetik), Çıkış Yok |
| 4 | M | – | character | M | Sabit Alan: Manyetik |
| 5 | knots | knots | numeric | 0.004 | Yer Üstünde Hız |
| 6 | N | – | character | N | Sabit Alan: Knots |
| 7 | kph | km/h | numeric | 0.008 | Yer Üstünde Hız |
| 8 | K | – | character | K | Sabit Alan: Kilometre/Saat |
| 9 | posMode | – | character | A | Mod Göstergesi |
| 10 | cs | – | hexadecimal | *06 | Checksum |
| 11 | CRLF | – | character | – | Satırbaşı (CR) ve Yeni Satır (LF) |
3. $GPGGA (Küresel Konumlandırma Sistemi Sabit Verileri)
// Mesaj Formatı
// $xxGGA,time,lat,NS,long,EW,quality,numSV,HDOP,alt,M,sep,M,diffAge,diffStation*cs<CR><LF>
$GPGGA,092725.00,4717.11399,N,00833.91590,E,1,08,1.01,499.6,M,48.0,M,,*5B
| No | İsim | Birim | Format | Örnek | Açıklama |
| 0 | xxGGA | – | string | $GPGGA | GGA Mesaj Kimliği (xx = Geçerli Konuşmacı Kimliği) |
| 1 | time | – | hhmmss.ss | 092725.00 | UTC Zaman (09:27:25) |
| 2 | lat | – | ddmm.mmmmm | 4717.11399 | Enlem (Derece ve Dakika), 47 Derece 17.11399 Dakika |
| 3 | NS | – | character | N | Kuzey (N) / Güney (S) Göstergesi |
| 4 | long | – | dddmm.mmmmm | 00833.91590 | Boylam (Derece ve Dakika), 8 Derece 33.91590 Dakika |
| 5 | EW | – | character | E | Doğu (E) / Batı (W) Göstergesi |
| 6 | quality | – | digit | 1 | Pozisyon Sabitleme İçin Kalite Göstergesi |
| 7 | numSV | – | numeric | 08 | Kullanılan Uydu Sayısı |
| 8 | HDOP | – | numeric | 1.01 | Hassasiyetin Yatay Seyreltmesi |
| 9 | alt | m | numeric | 499.6 | Deniz Seviyesinden Yükseklik |
| 10 | uAlt | – | character | M | Yükseklik Birimi: Metre |
| 11 | sep | m | numeric | 48.0 | Jeoid Ayrımı: Jeoid ile Ortalama Deniz Seviyesi Arasındaki Fark |
| 12 | uSep | – | character | M | Ayırma birimi: Metre |
| 13 | diffAge | s | numeric | – | Diferansiyel Düzeltmelerin Yaşı (DGPS Kullanılmadığında Boş) |
| 14 | diffStation | – | numeric | – | Diferansiyel Düzeltmeler Sağlayan İstasyonun ID’si (DGPS Kullanılmadığında Boş) |
| 15 | cs | – | hexadecimal | *5B | Checksum |
| 16 | CRLF | – | character | – | Satırbaşı (CR) ve Yeni Satır (LF) |
4. $GPGSA (Küresel Konumlandırma GNSS DOP ve Aktif Uydular)
// Mesaj Formatı
// $xxGSA,opMode,navMode{,sv},PDOP,HDOP,VDOP*cs<CR><LF>
$GPGSA,A,3,23,29,07,08,09,18,26,28,,,,,1.94,1.18,1.54*0D
| No | İsim | Birim | Format | Örnek | Açıklama |
| 0 | xxGSA | – | string | $GPGSA | GSA Mesaj Kimliği (xx = Geçerli Konuşmacı Kimliği) |
| 1 | opMode | – | character | A | Çalışma Modu |
| 2 | navMode | – | digit | 3 | Navigasyon Modu |
| 3+1*N | sv | – | numeric | 29 | Uydu Numarası |
| 15 | PDOP | – | numeric | 1.94 | Hassasiyetin Pozisyon seyreltmesi |
| 16 | HDOP | – | numeric | 1.18 | Hassasiyetin Yatay Seyreltmesi |
| 17 | VDOP | – | numeric | 1.54 | Hassasiyetin Dikey seyreltmesi |
| 18 | cs | – | hexadecimal | *0D | Checksum |
| 19 | CRLF | – | character | – | Satırbaşı (CR) ve Yeni Satır (LF) |
5. $GPGSV (Küresel Konumlandırma Görünümdeki GNSS Uyduları)
// Mesaj Formatı
// $xxGSV,numMsg,msgNum,numSV,{,sv,elv,az,cno}*cs<CR><LF>
$GPGSV,3,1,10,23,38,230,44,29,71,156,47,07,29,116,41,08,09,081,36*7F
$GPGSV,3,2,10,10,07,189,,05,05,220,,09,34,274,42,18,25,309,44*72
$GPGSV,3,3,10,26,82,187,47,28,43,056,46*77
| No | İsim | Birim | Format | Örnek | Açıklama |
| 0 | xxGSV | – | string | $GPGSV | GSV Mesaj Kimliği (xx = GSV Konuşmacı Kimliği) |
| 1 | numMsg | – | digit | 3 | İleti Sayısı, Çıktısı Alınan Toplam GSV İletisi Sayısı |
| 2 | msgNum | – | digit | 1 | Bu Mesajın Numarası |
| 3 | numSV | – | numeric | 10 | Görüntülenen Uydu Sayısı |
| 4 + 4*N | sv | – | numeric | 23 | Uydu ID |
| 5 + 4*N | elv | deg | numeric | 38 | Yükseklik (0-90) |
| 6 + 4*N | az | deg | numeric | 230 | Azimut (0-359) |
| 7 + 4*N | cno | dBHz | numeric | 44 | Sinyal Gücü (C/N0, 0-99), İzleme Yapılmadığında Boş |
| 5.. 16 | cs | – | hexadecimal | *7F | Checksum |
| 6.. 16 | CRLF | – | character | – | Satırbaşı (CR) ve Yeni Satır (LF) |
6. $GPGLL (Küresel Konumlandırma Konum ve Durum Zamanı ile Enlem ve Boylam)
// Mesaj Formatı
// $xxGLL,lat,NS,long,EW,time,status,posMode*cs<CR><LF>
$GPGLL,4717.11364,N,00833.91565,E,092321.00,A,A*60
| No | İsim | Birim | Format | Örnek | Açıklama |
| 0 | xxGLL | – | string | $GPGLL | GLL Mesaj Kimliği (xx = Geçerli Konuşmacı Kimliği) |
| 1 | lat | – | ddmm.mmmmm | 4717.11364 | Enlem (Derece ve Dakika), 47 Derece 17.11364 Dakika |
| 2 | NS | – | character | N | Kuzey(N) / Güney(S) Göstergesi |
| 3 | long | – | ddmm.mmmmm | 00833.91565 | Boylam (Derece ve Dakika), 8 Derece 33.91565 Dakika |
| 4 | EW | – | character | E | Doğu (E) / Batı (W) Göstergesi |
| 5 | time | – | hhmmss.ss | 092321.00 | UTC Zaman (09:23:21) |
| 6 | status | – | character | A | V: Veri Geçersiz veya Alıcı Uyarısı, A = Veri Geçerli |
| 7 | posMode | – | character | A | Konumlandırma Modu |
| 8 | cs | – | hexadecimal | *60 | Checksum |
| 9 | CRLF | – | character | – | Satırbaşı (CR) ve Yeni Satır (LF) |
NEO-6M GPS Çipi NMEA cümleleri hakkında daha ayrıntılı bilgi için datasheet dosyasını inceleyebilirsiniz.
GY-NEO6MV2 GPS Modülü, düşük maliyetli ve güvenilir bir GPS çözümü arayanlar için mükemmel bir tercihtir. Ayrıca geliştirme kartları ile kolayca entegre olabilir ve geniş bir uygulama yelpazesinde kullanılabilir. GY-NEO6MV2 GPS Modülü ile hazırlanmış uygulamalar ve daha fazlası için Maker Blog’umuzu ziyaret edebilirsiniz.
Diğer Uygulamalar
Merhaba arkadaşlar, bu yazımızda Trudyo Geliştirme Kartı kullanarak GPS konumu izleme uygulaması yapacağız. GPS konumlarını...
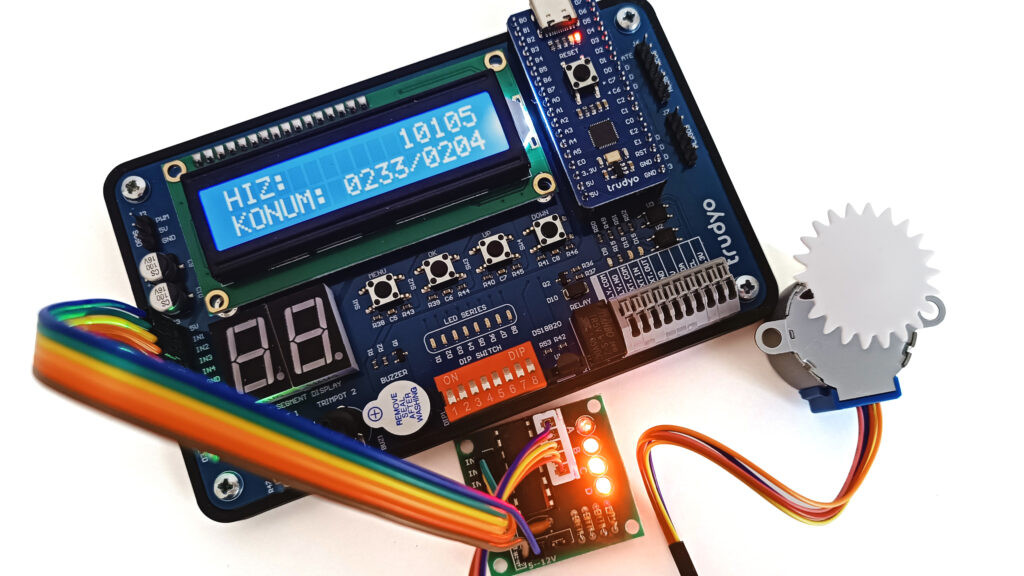
Merhaba arkadaşlar, bu yazımızda Trudyo Geliştirme Kartı‘nı kullanarak 28BYJ-48 Step Motor kontrol uygulaması yapacağız. İlk...





Yorum yapmak için giriş yapmalısınız.